
د روبوټکس په پراختیا سره، خودمختاره ګرځنده روبوټونه د دوی د فعالیت او استخباراتو سره د خلکو په تولید او ژوند کې په پراخه کچه کارول کیږي.خودمختاره ګرځنده روبوټونه د بهرني چاپیریال او خپل حالت احساس کولو لپاره مختلف سینسر سیسټمونه کاروي ، په پیچلي پیژندل شوي یا نامعلوم چاپیریال کې په خپلواکه توګه حرکت کوي او ورته دندې بشپړوي.
Dتعریفد سمارټ روبوټ څخه
په معاصر صنعت کې، روبوټ یو مصنوعي ماشین وسیله ده چې کولی شي په اتوماتيک ډول دندې ترسره کړي، د دوی په کار کې د انسانانو ځای ونیسي یا مرسته وکړي، معمولا الیکټرو میخانیکي، د کمپیوټر پروګرام یا بریښنایی سرکټ لخوا کنټرول کیږي.د ټولو ماشینونو په شمول چې د انسان چلند یا فکر تقلید کوي او نور مخلوقات (د بیلګې په توګه روبوټ سپي، روبوټ پیشوګانې، روبوټ موټرې، او داسې نور)
د هوښیار روبوټ سیسټم جوړښت
■ هارډویر:
د هوښیار سینسنګ ماډلونه - لیزر/کیمره/انفرارډ/الټراسونک
د IoT مخابراتو ماډل - د شالید سره ریښتیني وخت اړیکه ترڅو د کابینې وضعیت منعکس کړي
د بریښنا مدیریت - د تجهیزاتو بریښنا رسولو عمومي عملیاتو کنټرول
د ډرایو مدیریت - د وسیلې حرکت کنټرولولو لپاره سروو ماډل
■ سافټویر:
د سینسر ټرمینل راټولول - د سینسر لخوا راټول شوي ډاټا تحلیل او د سینسر کنټرول
ډیجیټل تحلیل - د ډرایو تحلیل او د محصول منطق احساس کول او د وسیلې عملیات کنټرول کول
د شاته دفتر اداره اړخ - د محصول فعالیت ډیبګ کولو اړخ
د آپریټر اړخ - د ترمینل پرسونل کاروونکي کار کوي
د هوښيارۍ موخېروبوټونهغوښتنلیک
د تولید اړتیاوې:
عملیاتي موثریت: د ساده لاسي عملیاتو پرځای د هوښیار روبوټونو کارولو له لارې عملیاتي موثریت ښه شوی.
د لګښت پانګه اچونه: د تولید کرښې کاري جریان ساده کول او د کار لګښت کمول.
د ښاري چاپیریال اړتیاوې:
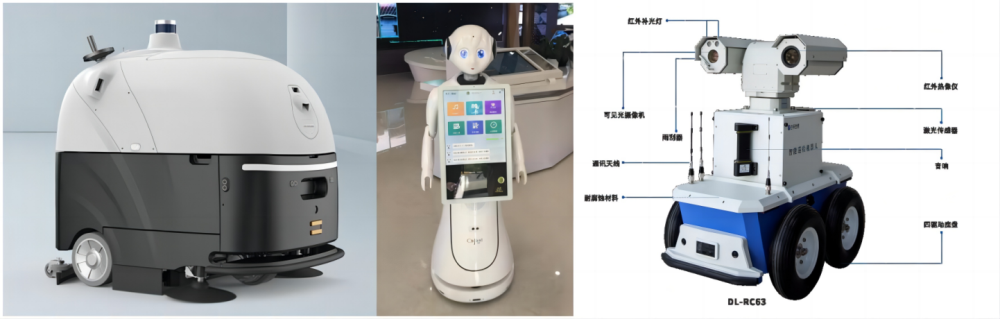
د چاپیریال پاکول: هوښیار سړک پاکول ، د مسلکي تخریب روبوټ غوښتنلیکونه
هوښیار خدمتونه: د خواړو خدمت غوښتنلیکونه ، د پارکونو او پویلیونونو لارښود سفرونه ، د کور لپاره متقابل روبوټونه
په هوښیار روبوټکس کې د الټراساؤنډ رول
د الټراسونیک رینج سینسر د غیر تماس سینسر کشف دی.د الټراسونک نبض د الټراسونک ټرانسډوسر لخوا خارج شوی د خنډ سطح ته تبلیغ کوي ترڅو د هوا له لارې اندازه شي ، او بیا د انعکاس وروسته د هوا له لارې الټراسونک ټرانسډوسر ته راستون کیږي.د لیږد او رسیدلو وخت د خنډ او لیږدونکي ترمینځ ریښتیني واټن قضاوت کولو لپاره کارول کیږي.
د غوښتنلیک توپیرونه: الټراسونک سینسرونه لاهم د روبوټیک غوښتنلیک ساحې په اصلي برخه کې دي، او محصولات د لیزرونو او کیمرونو سره د مرستندویه همکارۍ لپاره کارول کیږي ترڅو د پیرودونکي غوښتنلیکونو اړتیاوې پوره کړي.
د مختلف کشف وسیلو په مینځ کې ، د الټراسونک سینسر سیسټمونه د ګرځنده روبوټیکونو په برخه کې د دوی د ټیټ لګښت ، اسانه نصب کولو ، بریښنایی مقناطیسي ته لږ حساسیت ، د اندازه کولو لپاره د څیز رڼا ، رنګ او لوګي له امله پراخه کارونې لري ، او هوښیار. د وخت معلومات، او داسې نور. دوی د سخت چاپیریال سره یو مشخص تطابق لري چیرې چې د اندازه کولو څیز په تیاره کې وي، د دوړې، لوګي، برقی مقناطیسي مداخلې، زهرجن او نور سره.
ستونزې به په هوښیار روبوټیکونو کې د الټراساؤنډ سره حل شي
ځوابوخت
د روبوټ خنډ مخنیوی کشف په عمده ډول د حرکت په جریان کې کشف کیږي ، نو محصول باید وړتیا ولري چې د محصول لخوا کشف شوي توکي په ریښتیني وخت کې ګړندي تولید کړي ، د ځواب وخت ګړندی ښه.
د اندازه کولو لړۍ
د روبوټ د خنډ مخنیوی سلسله په عمده توګه د نږدې رینج خنډ مخنیوی باندې متمرکزه ده، معمولا د 2 مترو په اوږدو کې، نو د لوی رینج غوښتنلیکونو ته اړتیا نشته، مګر د لږ تر لږه د کشف فاصله ارزښت د امکان تر حده کوچنی وي.
بیمزاویه
سینسرونه ځمکې ته نږدې نصب شوي، کوم چې ممکن د ځمکې غلط کشف شامل کړي او له همدې امله د بیم زاویه کنټرول لپاره ځینې اړتیاو ته اړتیا لري

د روبوټیک خنډ مخنیوي غوښتنلیکونو لپاره ، ډینینګپو د IP67 محافظت سره د الټراسونک فاصلې سینسرونو پراخه لړۍ وړاندیز کوي ، دا د دوړو تنفس پروړاندې کولی شي او په لنډه توګه لندبل کیدی شي.د PVC موادو بسته بندي، د یو ټاکلي مقاومت مقاومت سره.
هدف ته فاصله په بیروني چاپیریال کې د ګډوډۍ په لرې کولو سره په ښه توګه کشف کیږي چیرې چې ګډوډي شتون لري.سینسر تر 1cm پورې ریزولوشن لري او تر 5.0m پورې فاصله اندازه کولی شي.د الټراسونک سینسر هم لوړ فعالیت، کوچنۍ اندازه، کمپیکٹ، ټیټ لګښت، کارول اسانه او لږ وزن لري.په ورته وخت کې، دا د بیټرۍ چلولو IoT سمارټ وسیلو په ساحه کې هم په پراخه کچه کارول شوی.
د پوسټ وخت: جون-13-2023